
How Meta Bridged the Gap Between Pixels and 3D Space
SAM 3 and SAM 3D are solving some of the biggest bottlenecks in robotics, VFX, and spatial computing.

There is a fundamental divide in how machines see the world. Visual intelligence can tell you what is in a scene (pixels, colors, edges). Spatial intelligence can tell you where it exists (depth, pose, geometry).
Meta just dropped a massive open-source release that bridges that gap at scale in two model families: SAM 3 and SAM 3D.
Together, they form a complete perception system that also solves the training data bottleneck that has held back 3D AI for years. Meta did this by applying the Large Language Model playbook to the physical world.
We are looking at the infrastructure for Physical AI.
For a complete breakdown of the models and the data engine behind them, watch my video below:
SAM 3: Understanding “Concepts,” Not Just Objects
Previous segmentation models were limited to fixed categories—person, car, dog. If it wasn’t in the training set, the model was blind to it.
SAM 3 changes the game by detecting visual concepts via text prompts. It doesn’t just find an object; it finds every instance of a description. You can prompt for things like “people sitting down,” “person holding a package,” or “person on the ground” (essentially baked-in fall detection).
Meta achieved this by mining Wikipedia to build a massive ontology of relationships, specifically focusing on the long tail distribution—those rare edge cases that rarely show up in training data but matter critically when they do.

SAM 3D: The “LLM Playbook” for Geometry
The real revolution here, however, is in 3D.
Historically, getting 3D training data was a nightmare. You either had expensive synthetic assets or messy, 3D scans of the real world. Neither scaled well.
Meta’s solution? RLHF for 3D reconstruction.
They built a data engine that mimics how we train LLMs:
Generation: Models generate multiple mesh options for a scene.
Verification: Human evaluators rank them.
Loop: The best data feeds back into the model, which improves the data engine, which improves the model.
Suddenly, you can annotate close to a million images with 3D ground truth. This industrializes the process of crossing from synthetic simulation to real-world perception.
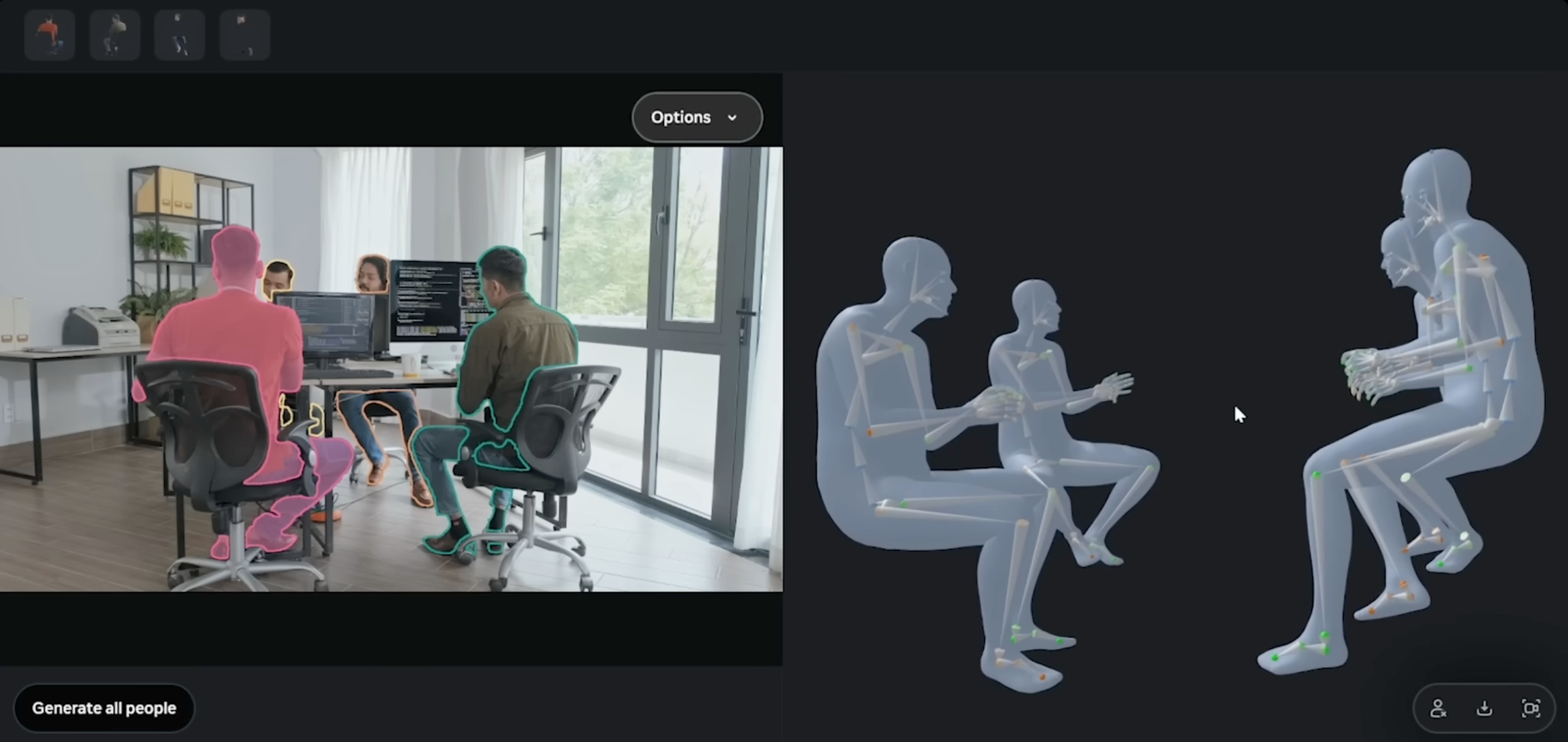
To handle the complexity of the physical world, Meta released two versions: SAM 3D Objects, which reconstructs general objects and scenes, and SAM 3D Body, which focuses on accurate human pose estimation.

The Convergence: A Unified Perception Stack
When you combine SAM 3 (Concept Detection) with SAM 3D (Spatial Reconstruction), you get a unified stack for understanding the physical world.
Consumer: In Facebook Marketplace, you can now visualize if a lamp fits in your living room in 3D, just from a 2D seller photo.
Robotics: Robots get a queryable world, allowing them to segment and track objects in 3D space for manipulation and navigation.
VFX: Artists get automated rotoscoping and 3D pose estimation, making it trivial to reskin reality.
The Quiet Danger
However, there is a double-edged sword here that we need to talk about. This same technology is also the perfect infrastructure for comprehensive surveillance.
We now have a deployment-ready system that can detect any concept, track it across video, and reconstruct its precise 3D pose and spatial relationships. Because this is open-source and commercially licensed, the gap between what is technically possible and what is legally regulated just got a lot wider.

On The Horizon 🔭
We are moving toward a world where physical spaces are as programmable and queryable as a database.
SAM 3 and SAM 3D are the early foundation layers for this shift. Whether it’s for wildlife tracking, populating the metaverse, or giving spatial intelligence to the next generation of robots, the tools are now out in the wild.
Go build something amazing (and responsible).
If you found this useful, share it with fellow reality mappers. The future’s too interesting to navigate alone.
Cheers, Bilawal Sidhu
https://bilawal.ai
Very useful indeed. 👍🏻👍🏻👍🏻