
Soldiers Can Now See Through Walls: the Rise of Human–Robot Co-Perception
AR turns fused sensor data into a world both humans and autonomous systems can navigate together

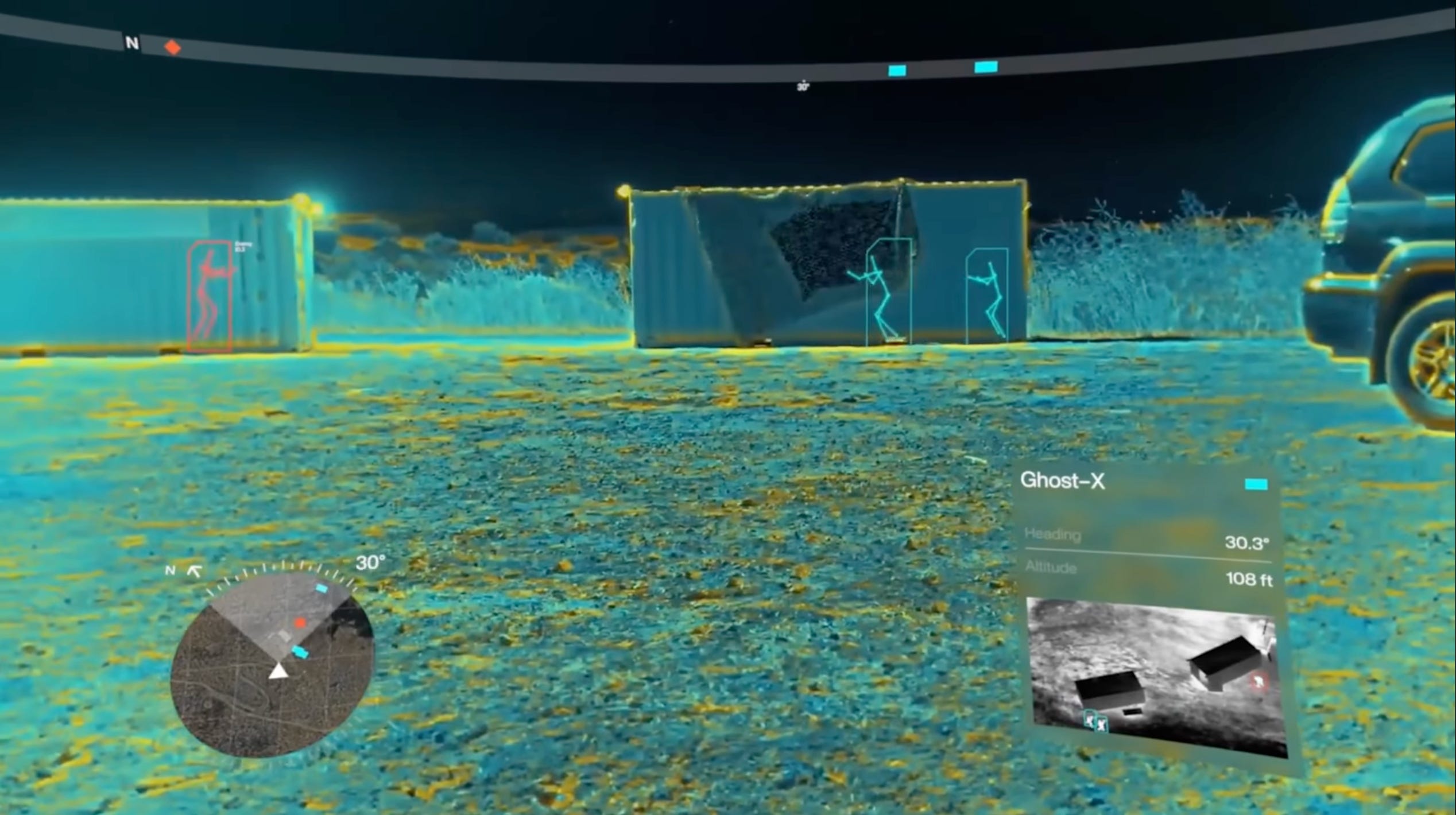
Anduril’s new EagleEye AR headset shows where battlefield tech is headed by creating a unified view of the world built from drones, satellites, ground sensors, and soldier-worn devices—all fused into a single 3D picture.
A drone sees a hostile behind a building.
That person immediately appears in your headset as a red silhouette—even through the wall.
Spot someone in a window, and every drone in the air locks onto the same target.
It’s a shared battlefield map updated in real time, with both humans and autonomous systems operating on the same information.
But this tech has larger implications beyond the defense sector.
To see the full breakdown of the system, check out my latest video:
Human & Robot Views Combined
What makes EagleEye novel is that it brings people and machines into one operational environment. Robots already perceive the world with structured geometry: line-of-sight, depth, object permanence, and path planning.
This system aligns human perception with that same model.
Thermal overlays and night-vision fusion aren’t new. The military has been able to see in the dark, peer through smoke, and blend sensor layers for years. The novel shift is AR becoming the interface for all of it—turning raw sensing into something spatial and intuitive.
Lattice is the engine behind this. It’s Anduril’s real-time operating platform that fuses every sensor in the battlespace—drones, satellites, ground vehicles, soldier-worn devices—into one coherent 3D model. The headset projects that model back onto the environment. Once everything is spatially aligned, entirely new interactions emerge.
It’s the beginning of a common interface for mixed human-robot teams.
The Emerging Pattern
As soon as systems begin to understand environments in 3D, whole categories of tasks become dramatically easier: navigation, targeting, inspection, coordination, and multi-agent teamwork.
We’ve been watching the shift as AI models learn to interpret visual data the way humans do—identifying structure, depth, motion, and intent— and here we’re seeing the inverse trend unfold as well. AR systems like this let humans tap into the structured, machine-readable view of the world.

On The Horizon 🔭
This tech is military-only today, but the underlying architecture won’t stay confined to defense. The same building blocks of sensor fusions that create AR-enabled human-robot interfaces are going to spill outward into civilian domains.
Construction crews will navigate sites with live spatial overlays.
Search-and-rescue teams will see through smoke, rubble, and darkness with fused sensor views.
Inspection drones and ground robots will share a common map with operators instead of streaming disconnected feeds.
Cities will gain operational pictures that unify everything from CCTV to infrastructure sensors.
We’re moving toward a world where interacting with software increasingly means interacting with a live model of physical reality—updated continuously, understood collectively, and shared across humans and machines.
As these systems mature, the real world becomes the interface.
If you found this useful, share it with fellow reality mappers. The future’s too interesting to navigate alone.
Cheers,
Bilawal Sidhu
https://bilawal.ai
Yessir darpa doing what darpa does
You could cook up some incredible performance changing things with an unlimited budget! Just let me in on the ipo! Keep up your content I’m a forever fan !